注解处理器
javaweb
汇编
picgo
random
matlab入门案例
STM32G070RBT6
电子电工
天猫
控制算法
数码管
多态和虚函数的使用底层实现原理
命名实体识别
材料计算
IO流的异常处理方式
字节打印流
linux安装qt
keras
SpringBoot项目的创建
粘包拆包
Copter
2024/4/13 3:38:42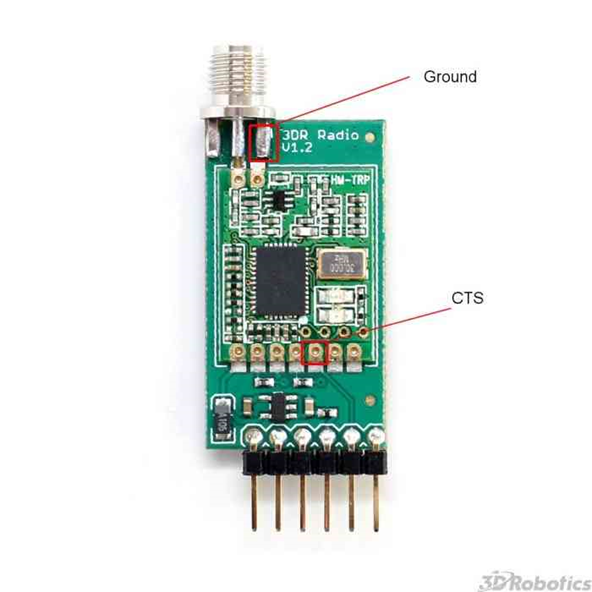
(1)(1.13) SiK无线电高级配置(六)
文章目录
前言
15 使用FTDI转USB调试线配置SiK无线电设备
16 强制启动加载程序模式
17 名词解释 前言 本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 15 使用FTDI转USB调试线配置SiK无线…

(2)(2.1) Andruav Android Cellular(一)
文章目录
前言
1 Andruav 是什么?
2 Andruav入门
3 Andruav FPV
4 Andruav GCS App 前言
Andruav 是一个基于安卓的互联系统,它将安卓手机作为公司计算机,为你的无人机和遥控车增添先进功能。 1 Andruav 是什么ÿ…

(9)基于发射器的调优
文章目录 前言
1 概述
2 调优值
3 用任务规划器设置 前言
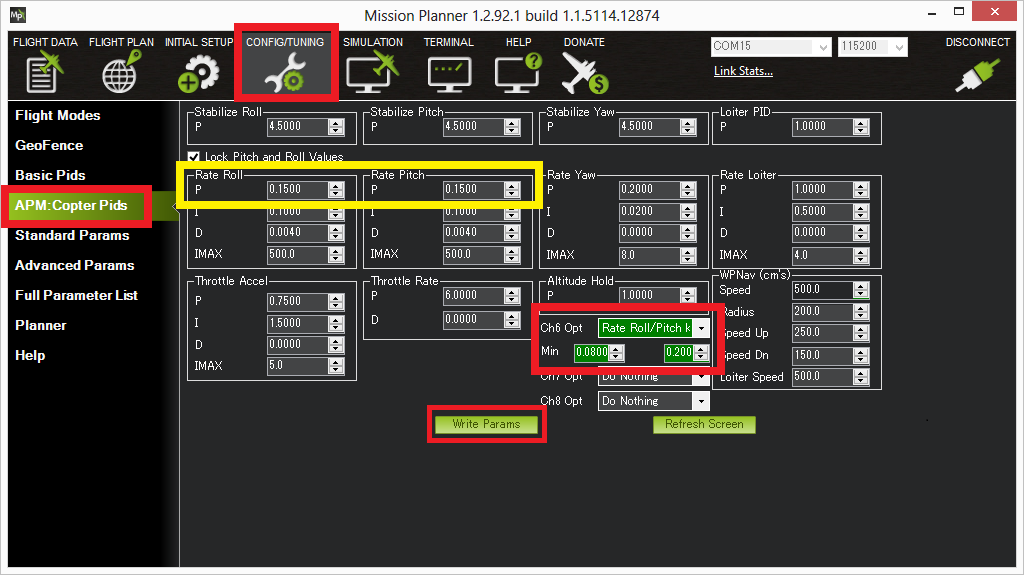
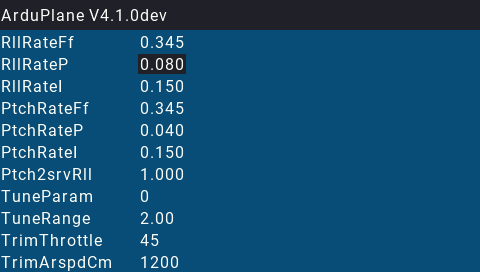
你可以在飞行中使用你的遥控发射器进行广泛的参数调优。这是为那些无法使用自动调优功能的高级用户准备的,或者希望通过对每个参数的完全手动调优控制来进行微调。 1 概述
基于发射机的调优允许你在飞行…
(1)(1.7) GY-US42声纳
文章目录
前言
1 连接方式
2 参数说明 前言
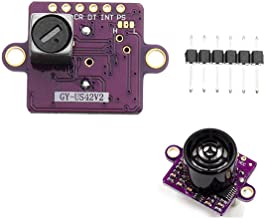
GY-US042v2 声纳是一款非常便宜的短程(最多 4m)测距仪,主要设计用于室内,但也成功用于室外的 Copter。与许多气压计相比,它能更稳定地控制 4m 以下的高度。 1 连接方式…
(2)(2.4) CRSF/ELRS Telemetry
文章目录
前言
1 ArduPilot 参数编辑器 前言
!Note
ELRS(ExpressLRS)遥控系统使用穿越火线协议,连接方式类似。不过,它不像穿越火线那样提供双向遥测。 TBS CRSF 接收机与 ArduPilot 的接口中包含遥测和遥控信息。…
(2)(2.2) Lightware SF45/B(350度)
文章目录
前言
1 安装SF45/B
2 连接自动驾驶仪
3 通过地面站进行配置
4 参数说明 前言
Lightware SF45/B 激光雷达(Lightware SF45/B lidar)是一种小型扫描激光雷达(重约 50g),扫描度可达 350 度,扫描范围 50m。 1 安装SF45…
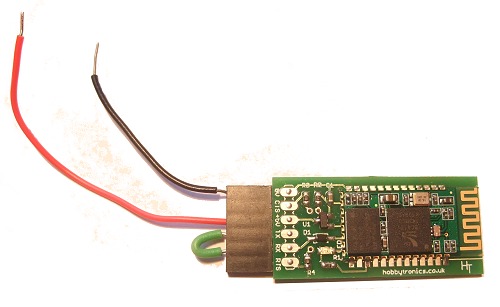
(1)(1.1) Bluetooth
文章目录
前言
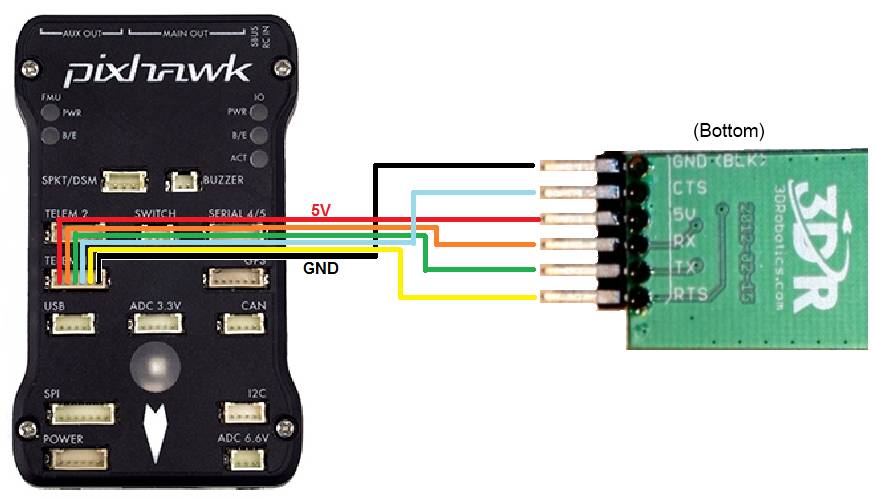
1 连接到自动驾驶仪
2 连接Mission Planner快速入门
3 与Mission Planner的详细连接
4 从安卓地面站连接
5 如何更改波特率、设备名称和设备密码
6 故障排除
7 产品规格 前言
蓝牙数据链路(如 HC-06 模块)(HC-06 module)可用于将…

(1)(1.4) ESP32 wifi telemetry
文章目录
前言
1 用于ESP32的DroneBridge
2 推荐的硬件
3 下载和烧录固件
4 为ESP32配置DroneBridge 前言
ESP32 是现成的 Wi-Fi 模块,具有完整的 TCP/IP 协议栈和微控制器功能。它们提供专用的 UART、SPI 和 I2C 接口。它们可与任何 ArduPilot 自动驾驶控制器…
(4)(4.3) Kogger Sonar
文章目录
前言
1 推荐硬件
2 配置回声探测仪模块
3 连接ArduPilot硬件
4 参数说明 前言
KOGGER 声纳(KOGGER Sonar)是一款结构紧凑、成本低廉的水下回声测深仪模块,带有 UART 接口,电源电压为 5-14v。 1 推荐硬件 CP210x USB->UART 转换器和安装…

(1)(1.10) JSN-SR04T声纳
文章目录
前言
1 连接到自动驾驶仪
2 参数说明 前言
JSN-SR04T 是一种超声波距离传感器。有两个版本 v2.0 和 v3.0。v2.0 的作用范围为 25 至 450cm,v3.0 的作用范围为 20 至 600cm。也更稳定。由于量程很短,因此使用范围有限。 1 连接到自动驾驶仪 …
(30)精准降落和悬停(IRLock)
文章目录 30.1 概述
30.2 哪里可以买到
30.3 连接到自动驾驶仪
30.4 安装到框架上
30.5 通过任务规划器进行设置
30.6 飞行和测试 30.1 概述
Copter 支持使用 IR-LOCK 传感器(IR-LOCK sensor)和声纳或激光雷达(sonar or lidar)进行精确着陆。使用该系统,当飞行…
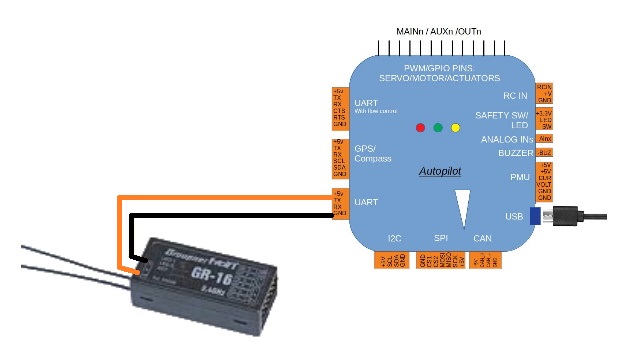
(1)(1.7) HOTT telemetry
文章目录
前言
1 布线和设置
2 参数说明 前言
Plane-4.0.0(及更高版本)、Copter-4.0.4(及更高版本)和 Rover-4.1.0(及更高版本)支持 Graupner HOTT 遥测技术。 1 布线和设置
与自动驾驶仪的连接可通过…

(2)(2.14) SPL Satellite Telemetry
文章目录
前言
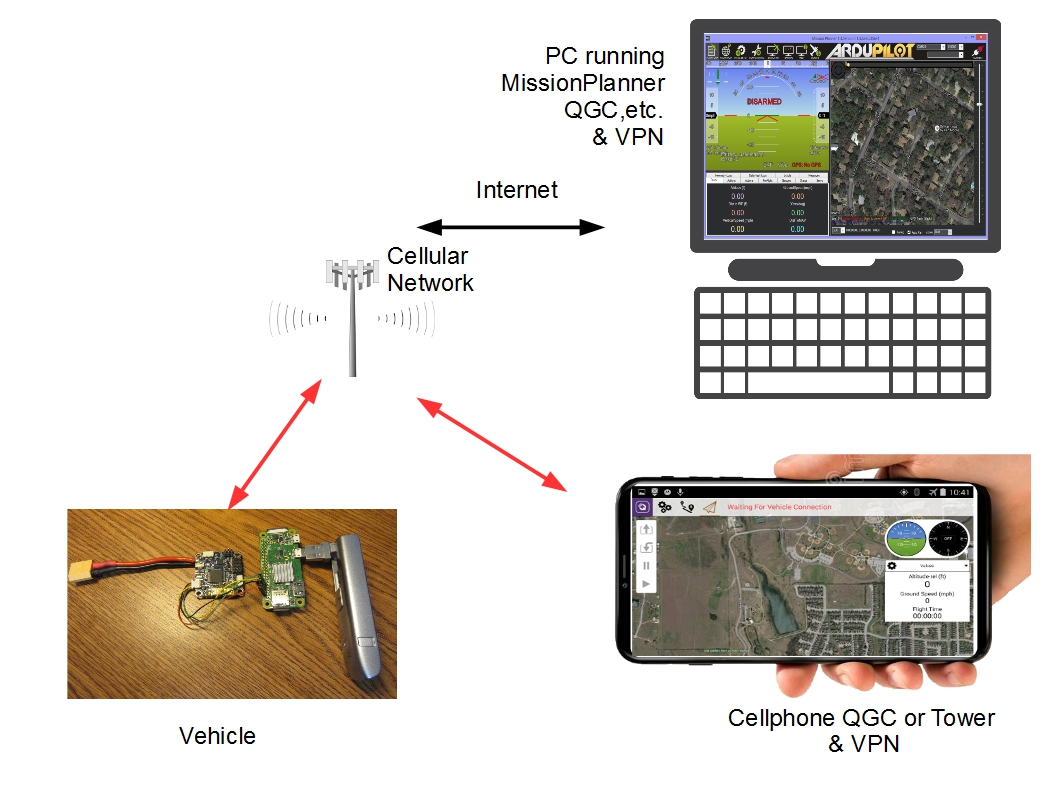
1 本地 Wi-Fi(费用:30 美元以上,范围:室内)
2 蜂窝电话(费用:100 美元以上,范围:蜂窝电话覆盖区域)
3 手机卫星(费用ÿ…

(6)蜂鸣器(又称音调报警)
文章目录
6.1 使用有源蜂鸣器而不是无源蜂鸣器
6.2 安装蜂鸣器
6.3 使蜂鸣器安静 蜂鸣器(或音调报警器)可用于以声音指示飞行器的状态变化。根据电路板的能力,它可以是一个有源设备(只需要施加电压来产生一个单一频率的音调&am…
(1)(1.13) SiK无线电高级配置(七)
文章目录
前言
17 技术细节
18 名词解释 前言
本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 17 技术细节 在评估该无线电是否符合当地法规时,了解其使用的技术可能会有所帮…
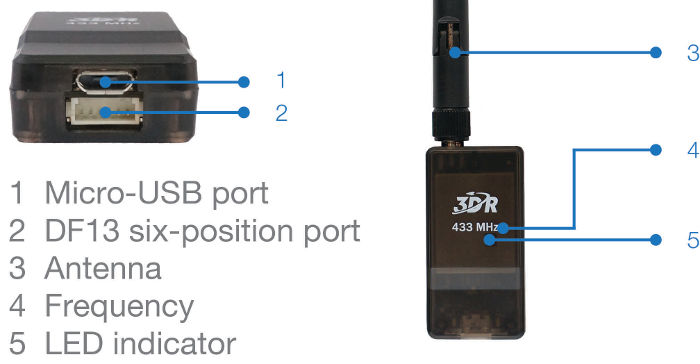
(1)(1.10) SiK Radio v1
文章目录
前言
1 概述
2 连接无线电台
3 参数说明 前言
本文介绍了如何将 3DR Radio v1 连接到飞行控制器。你还应阅读 SiK Radio v2,其中包含更详细的用户指南和功能列表。 1 概述
3DR 无线电设备是在自动驾驶仪和地面站之间建立遥测连接的最简单方法。
3DR…
(4)(4.5) Underwater Sonar (Analog)
文章目录
前言
1 推荐硬件
2 连接和配置
3 参数说明 前言
本页详细介绍了低成本模拟水下声纳(又称"探鱼器")和数字转换器的设置,数字转换器可将模拟读数转换成 NMEA 0183,供 ardupilot 读取。这种设置可以测量船下…
(8)(8.8) CAN总线设置
文章目录 前言
1 概述
2 配置设置
3 CAN ESCs 前言
本文展示了如何设置 CAN 总线,以及用户有哪些选项来完成适合其特定需求的设置。
!
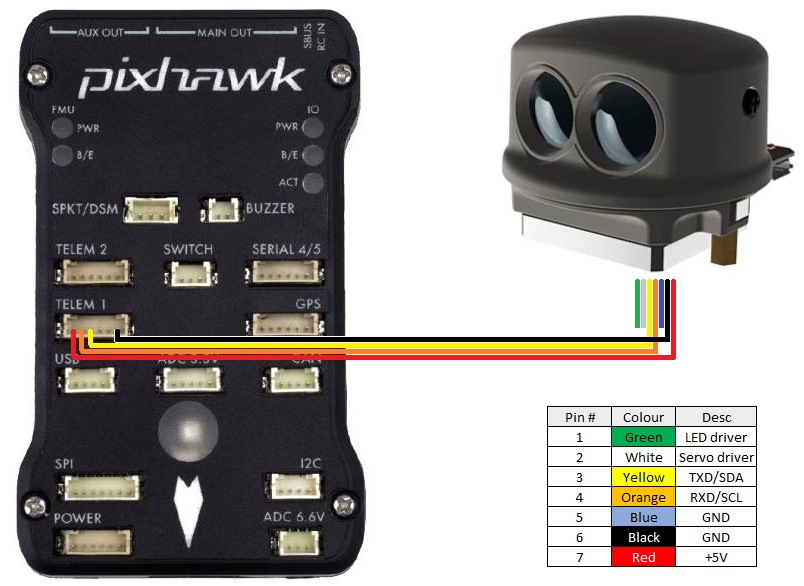
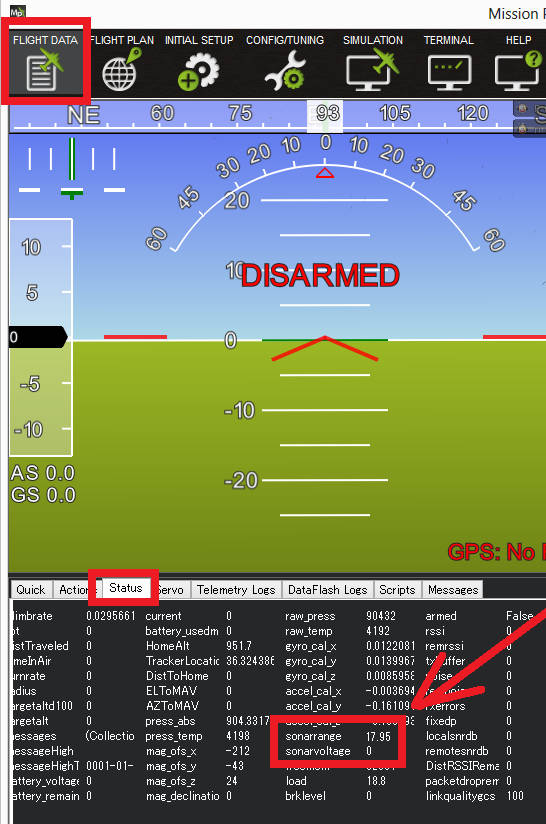
(1)(1.17) Maxbotix 模拟声纳
文章目录
前言
1 连接到Pixhawk
2 通过Mission Planner进行设置
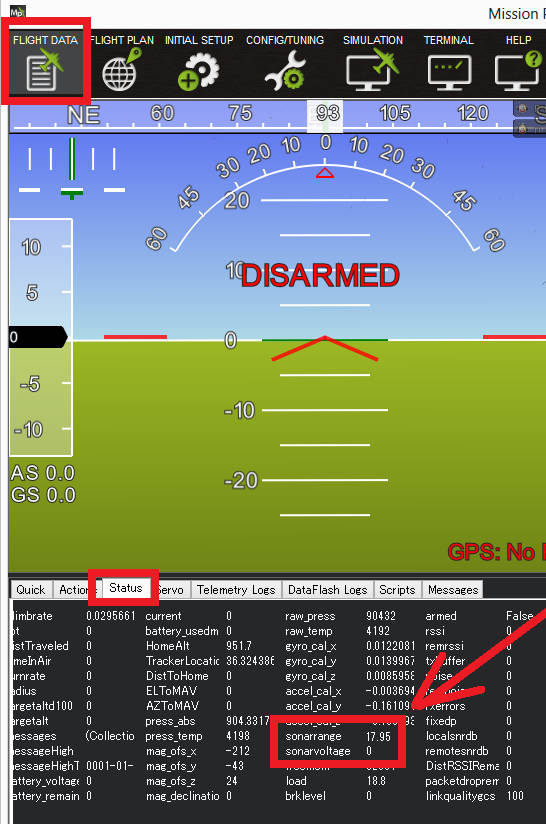
3 测试传感器
4 参数说明 前言
XL-Maxbotix-EZ 系列模拟声纳(XL-MaxSonar-EZ0、EZ4 和 EZL0)是相对便宜的短距离(7m 至 10m)测距仪,主要设计用于室…
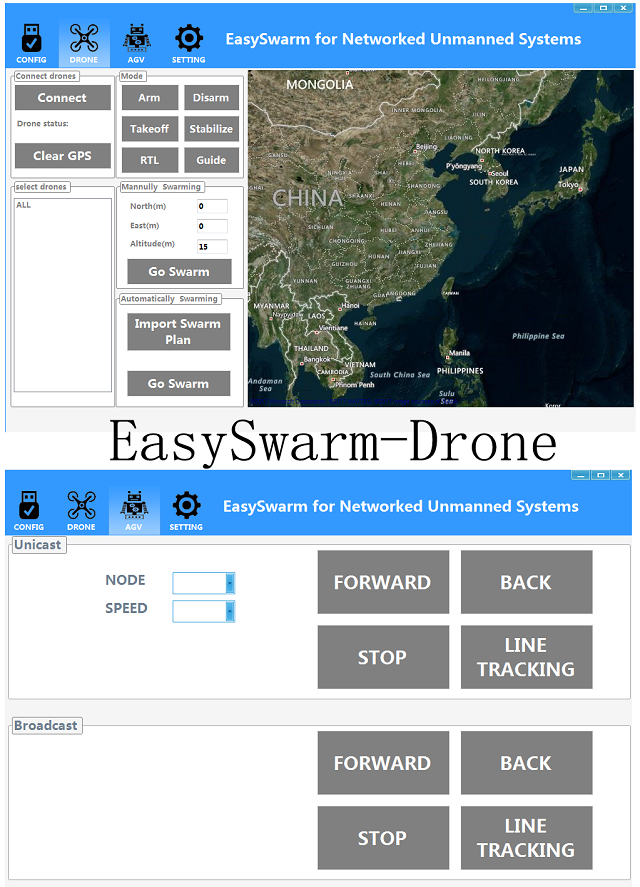
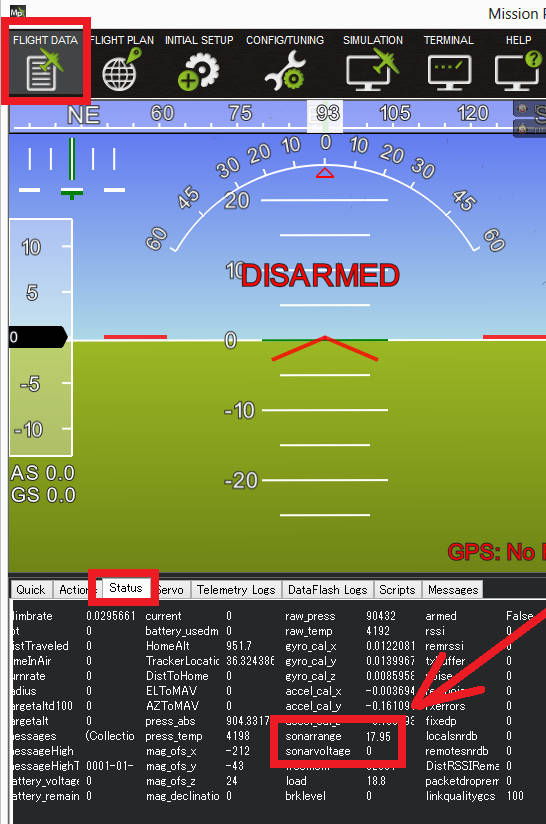
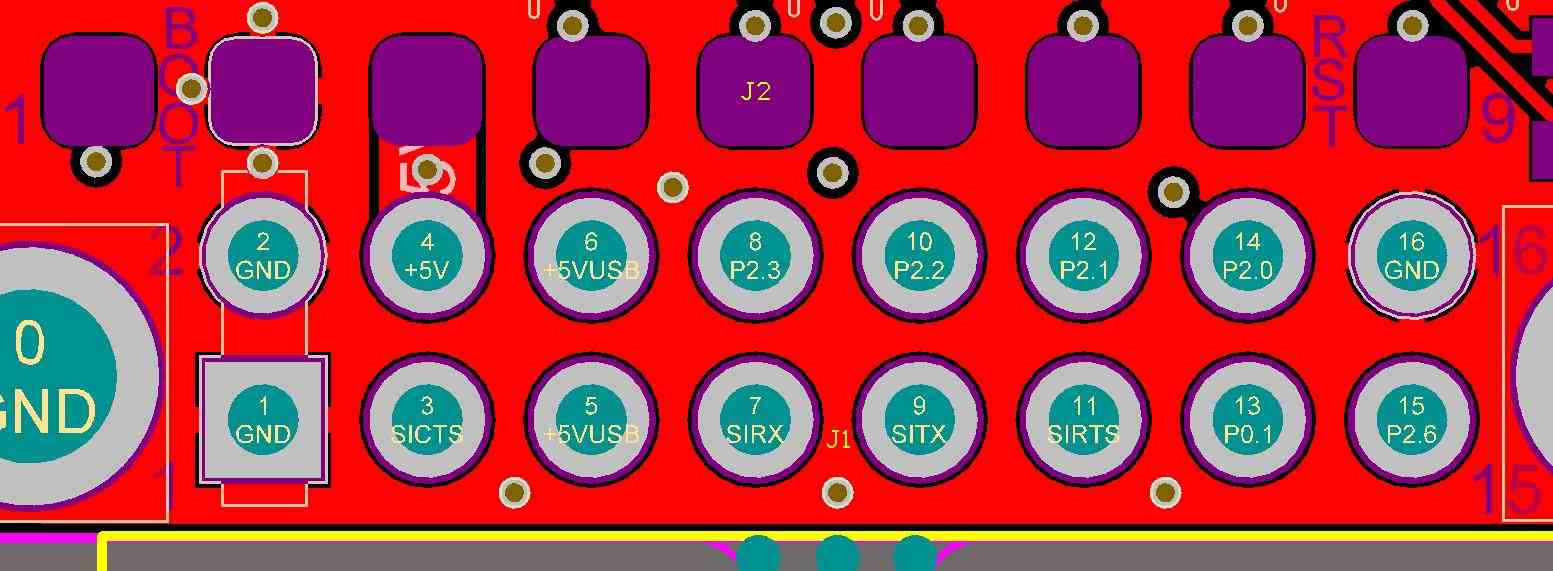
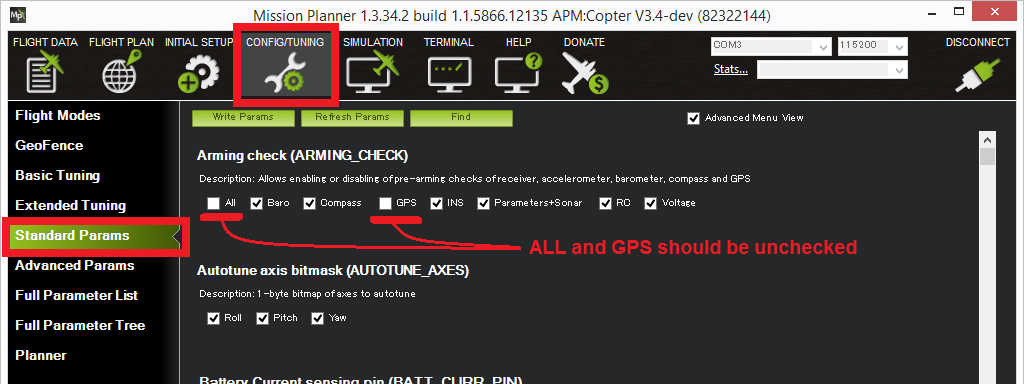
(2)(2.12) Robsense SwarmLink
文章目录
前言
1 规格(根据制造商提供)
2 EasySwarm
3 参数说明 前言
Robsense SwarmLink 遥测无线电可将多架无人机连接到一个地面站,而无需在地面站一侧安装多个无线电(即创建一个网状网络)。此外,还…

(1)(1.13) SiK无线电高级配置(五)
文章目录
前言
10 可用频率范围
11 DUTY_CYCLE 设置
12 低延迟模式
13 先听后说 (LBT)
14 升级无线电固件
15 MAVLink协议说明 前言 本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 1…

(3)(3.1) FlightDeck FrSky发射器应用程序
文章目录
前言
1 概述
2 Turnkey Packages
3 参数说明 前言
Craft and Theory 的 FlightDeck 可让你轻松查看飞行模式、高度、速度、姿态和关键系统警报,包括故障保护和电池错误,如电池不平衡警告和发射机低电量警报。 1 概述 Craft and Theory 的…
(2)(2.11) RFD900
文章目录
前言
1 概述
2 主要功能
3 状态LED指示灯
4 接口
5 使用Mission Planner进行配置
6 支持不同国家/地区
7 讨论论坛 前言
RFD900 无线电调制解调器是一款高功率 900Mhz ISM 波段无线电调制解调器,设计用于远距离串行通信。据报道,其通信…
(3)(3.5) 遥测无线电区域条例
文章目录
前言
1 支持不同国家/地区 前言
本专题列出了每个国家/地区可用的主要频率,并列出了无线电设备。
!Note
合规是你的责任。检查无线电是否符合所在地区/国家的频率、跳频信道和功率级别规定。 !Tip
我们很乐意在此表中添加更多…

(1)(1.12) LeddarTech LeddarVu8
文章目录
前言
1 连接到自动驾驶仪
2 参数说明 前言
LeddarTech LeddarVu8 是一款长距离(185m)激光雷达,可在 16 度至 99 度视场范围内提供 8 个单独的距离,具体取决于所使用的型号。ArduPilot 始终使用所提供的 8 个距离中最…

(2)(2.13) Rockblock Satellite Modem
文章目录
前言
1 支持的MAVLink命令信息
2 设置
3 使用方法
4 数据成本
5 参数 前言
!Note
该功能仅适用于 ArduPilot 4.4 或更高版本,并且要求飞行控制器支持 LUA 脚本(LUA Scripts)。 RockBLOCK 卫星调制解调器可实现与 ArduPilot 飞行器的全球…
(25)(25.1) 光学流量传感器的测试和设置
文章目录
25.1.1 测试传感器
25.1.2 校准传感器
25.1.3 测距传感器检查
25.1.4 预解锁检查
25.1.5 首次飞行
25.1.6 第二次飞行
25.1.7 正常操作设置
25.1.8 视频示例(Copter-3.4)
25.1.9 空中校准 25.1.1 测试传感器
将传感器连接至自动驾驶仪…
(2)(2.10) LTM telemetry
文章目录
前言
1 协议概述
2 配置
3 带FPV视频发射器的使用示例
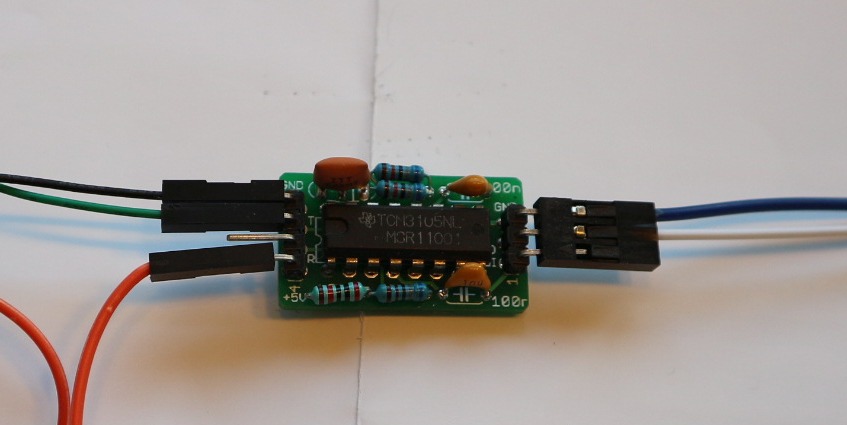
4 使用TCM3105的FSK调制解调器示例 前言
轻量级 TeleMetry 协议 (LTM) 是一种单向通信协议(从飞行器下行的数据链路),可让你以低带宽/低波特率(通常为 2400 波…
(16)燃油流量和液位传感器
文章目录 前言
16.1 燃油流量传感器
16.1.1 连接到自动驾驶仪
16.2 燃油液位传感器
16.2.1 PWM油位传感器
16.2.2 模拟油位传感器 前言
在 4.0 及以后的固件版本中,ArduPilot 提供了使用燃油流量和液位传感器的能力,此外还有电池监控器。支持脉冲输…

(1)(1.9) HC-SR04声纳
文章目录
前言
1 连接到自动驾驶仪
2 参数说明 前言
HC-SR04 声纳是一种价格低廉但量程很短(最远只有 2m)的测距仪,主要设计用于室内,但也成功地在室外的 Copter 上使用过。极短的测距范围使其用途有限。 !Warning…
(5)(5.4) 给新飞行员的建议
文章目录 前言 1 首次飞行 2 首次飞行的建议 3 关于低电池的警告 前言
本页为那些只有有限或没有遥控飞机或多旋翼飞机飞行经验的人提供一些初始飞行策略的建议。 1 首次飞行
将旋翼飞机放在平地上,连接电池--在陀螺仪校准完成之前(LED 灯闪烁红色和蓝…
(1)(1.8) Hondex声纳
文章目录
前言
1 推荐的硬件
2 连接和配置
3 参数说明 前言
Hondex HE-8S 是一款回声测深仪(又称水下声纳),测深范围 100m,内置 GPS 和 NMEA 输出,可由 ArduPilot 使用。其他 Hondex 声纳也可以使用,但…

(2)(2.4) TerraRanger Tower/Tower EVO(360度)
文章目录
前言
1 安装传感器并连接
2 通过地面站进行配置
3 参数说明 前言
TeraRanger Tower 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用距离约为 4.5m。
TeraRanger Tower EVO 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用…

(32)测距仪(声纳、激光雷达、深度摄影机)
文章目录
前言
32.1 单向测距仪
32.2 全向性近距离测距仪
32.3 基于视觉的传感器 前言
旋翼飞机/固定翼/无人车支持多种不同的测距仪,包括激光雷达(使用激光或红外线光束进行距离测量)、360 度激光雷达(可探测多个方向的障碍…
(1)(1.13) SiK无线电高级配置(一)
文章目录
前言
1 监控链接质量
2 诊断范围问题
3 MAVLink协议说明 前言
本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。 !Tip
大多数用户只需要 SiK Radio v2 中提供的基本…
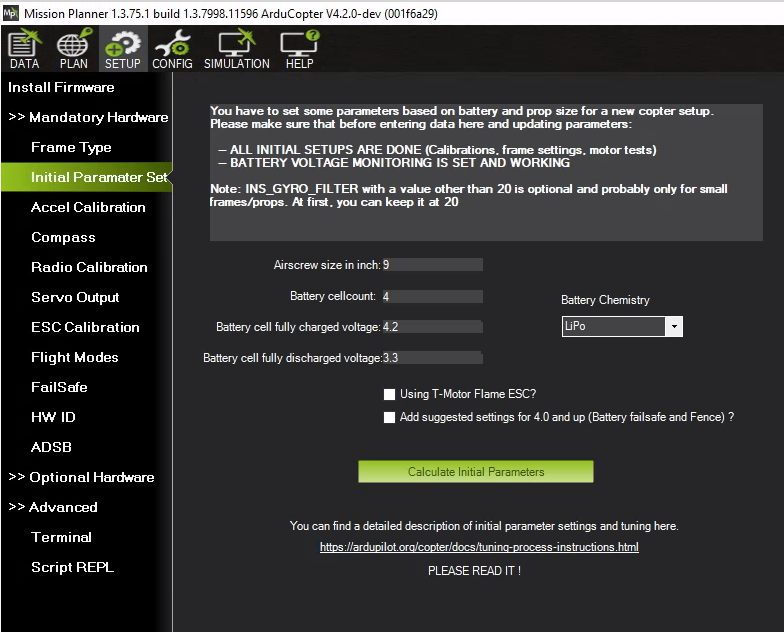
我的创作纪念日(2)设置飞机进行调优
文章目录 前言
2.1 电池设置
2.2 电机设置
2.3 PID控制器初始设置 前言
以下参数应根据你的飞机的规格正确设置。每一个都会影响调优过程的质量。 2.1 电池设置
确保你的 VTOL 电机的推力曲线尽可能的线性是非常重要的。一个线性的推力曲线意味着电机产生的实际推力的变化…

(1)(1.8) MSP(MultiWii 串行协议)(4.1 版)
文章目录
前言
1 协议概述
2 配置
3 参数说明 前言
ArduPilot 支持 MSP 协议,可通过任何串行端口进行遥测和传感器。这允许 ArduPilot 将其遥测数据发送到 MSP 兼容设备(如大疆护目镜),用于屏幕显示(OSDÿ…

(1)(1.9) MSP (version 4.2)
文章目录
前言
1 协议概述
2 配置
3 参数说明 前言
ArduPilot 支持 MSP 协议,可通过任何串行端口进行遥测、OSD 和传感器。这样,ArduPilot 就能将遥测数据发送到 MSP 兼容设备(如大疆护目镜),用于屏幕显示&#x…

(2)(2.9) Holybro Microhard P900无线电遥测设备
文章目录
前言
1 特点
2 规格
3 包装内包括 前言
Holybro Microhard Radio 集成了 microhard Pico 系列射频模块,能够在强大的拓扑结构中提供高性能无线串行通信,如点对点、点对多点和安全 Mesh(P840 不提供 Mesh)。 它采用跳…
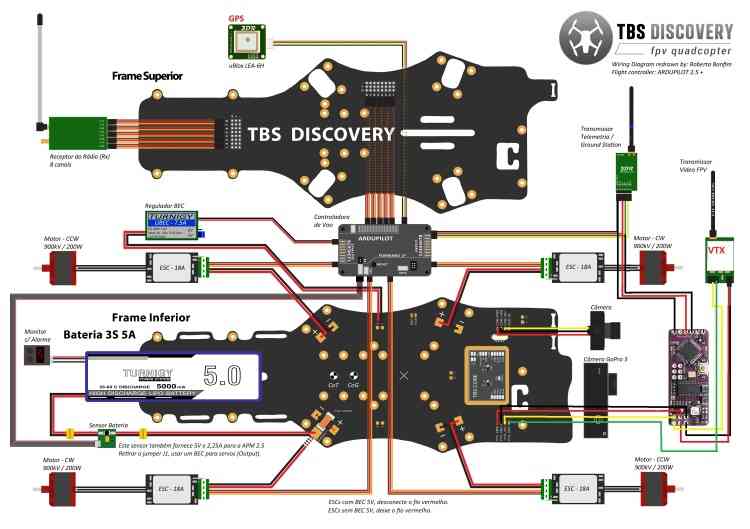
(15)第一人称视角视频
文章目录 前言
15.1 推荐的零件
15.2 连接图示
15.3 通过任务计划器最小化OSD设置
15.4 集成式OSD
15.5 用户视频/博客
15.6 与FPV飞行特别相关的安全警告
15.7 政府/地方法规 前言
第一人称视角在飞行时为你提供了真正的飞行员视角,它将视频摄像机和发射器…
(1)(1.11) SiK Radio v2(一)
文章目录
前言
1 概述
2 特点
3 状态LED灯 前言
SiK 遥测无线电是在自动驾驶仪和地面站之间建立遥测连接的最简单方法之一。本文提供了如何连接和配置无线电的基本用户指南。 3DR Radio v2(SiKRadio 的消费者版本)
!Note
本页面以前的…